Arduino-温湿度・気圧センサ「BME280」の使い方
当記事では、Arduinoで温湿度・気圧センサ「BME280」を使う方法を詳しく解説します。
温湿度・気圧センサ「BME280」はI2C/SPIで制御するため、ArduinoのWireライブラリ、SPIライブラリを使ったプログラムで、それぞれ動作させます。
なお、その他のArduino関数・ライブラリについては、以下の記事をご覧ください。
温湿度・気圧センサ「BME280」の基本スペック
「BME280」はI2C/SPI制御で、温湿度・気圧を測定できるセンサです。
当記事では、基板にモジュール化された秋月電子通商の「BME280使用 温湿度・気圧センサモジュールキット」を使用して、サンプルプログラムを解説していきます。
| 基本スペック | BME280 |
|---|---|
| 電源電圧 | DC1.71~3.6V |
| 通信方式 | I2C(最大 3.4MHz)/ SPI [4 線式 /3 線式 ](最大10MHz) |
| 測定レンジ/ 測定精度 | 温度:-40~+85℃/±1℃ 湿度:0~100%/±3% 気圧:300~1100hPa/±1hPa |
| 分解能 | 温度:1℃ 湿度:% 気圧:hPa |
| 消費電流 | 温湿度・気圧測定/sec:3.6μA スリープモード:0.1μA |
BME280のより詳細なスペックを確認したい場合は、以下のリンク先にあるデータシートをご覧ください。
温湿度・気圧センサ「BME280」のコマンド
| 名称 | 説明 | アドレス |
|---|---|---|
| hum_lsb | 湿度データ (下位8bit) | 0xFE |
| hum_msb | 湿度データ (上位8bit) | 0xFD |
| temp_xlsb | 温度データ (最下位4bit) | 0xFC |
| temp_lsb | 温度データ (下位8bit) | 0xFB |
| temp_msb | 温度データ (上位8bit) | 0xFA |
| press_xlsb | 気圧データ (最下位4bit) | 0xF9 |
| press_lsb | 気圧データ (下位8bit) | 0xF8 |
| press_msb | 気圧データ (上位8bit) | 0xF7 |
| config | 動作設定 | 0xF5 |
| ctrl_meas | 測定条件設定 | 0xF4 |
| status | ステータス | 0xF3 |
| ctrl_hum | 温度測定条件設定 | 0xF2 |
| calib26..calib41 | 補正用データ | 0xE1…0xF0 |
| reset | リセット | 0xE0 |
| id | チップID | 0xD0 |
| calib00..calib25 | 補正用データ | 0x88…0xA1 |
BME280のより詳細なコマンド内容を確認したい場合は、以下のリンク先にあるデータシートをご覧ください。
サンプルプログラム(サンプルスケッチ)
温湿度・気圧測定のサンプルプログラムをI2CとSPIでの方法にわけて紹介します。
なお、サンプルプログラム(サンプルスケッチ)で、ブレッドボードを使います。ブレッドボードの詳しい使い方は、以下の記事をご覧ください。
I2Cでの温湿度・気圧測定
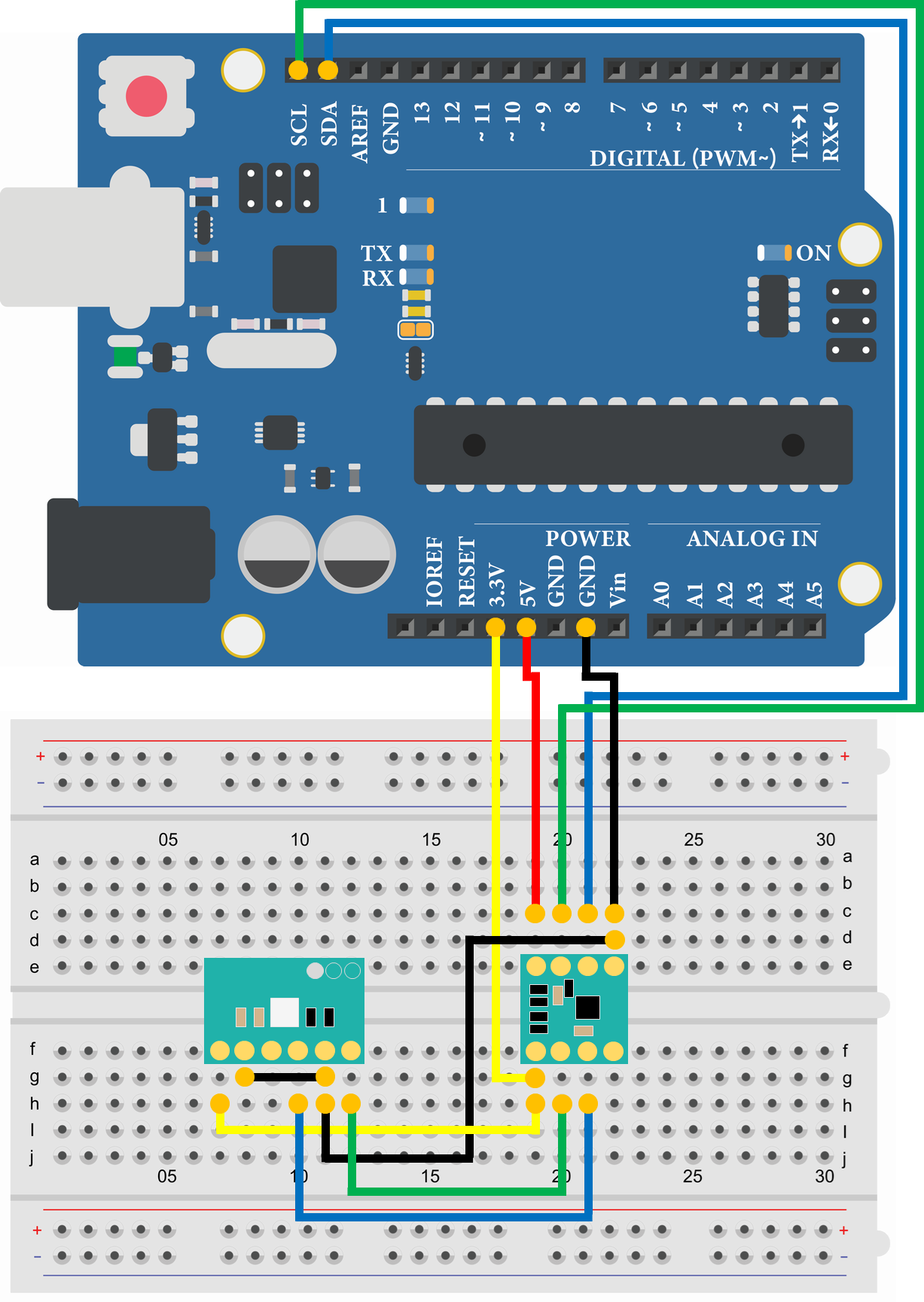
- BME280使用 温湿度・気圧センサモジュールキット
- I2Cバス用双方向電圧レベル変換モジュール(PCA9306)
- Arduino Uno
- USBケーブル
- ブレッドボード
- ジャンパ線
- PC(プログラム書き込み・シリアルモニタ表示)
※I2Cで通信するので、「BME280使用 温湿度・気圧センサモジュールキット」の「J3」をハンダ付けしてジャンパしてください。
#include <Wire.h>
//アドレス指定
#define BME280_ADDR 0x76
#define CONFIG 0xF5
#define CTRL_MEAS 0xF4
#define CTRL_HUM 0xF2
//気温補正データ
uint16_t dig_T1;
int16_t dig_T2;
int16_t dig_T3;
//湿度補正データ
uint8_t dig_H1;
int16_t dig_H2;
uint8_t dig_H3;
int16_t dig_H4;
int16_t dig_H5;
int8_t dig_H6;
//気圧補正データ
uint16_t dig_P1;
int16_t dig_P2;
int16_t dig_P3;
int16_t dig_P4;
int16_t dig_P5;
int16_t dig_P6;
int16_t dig_P7;
int16_t dig_P8;
int16_t dig_P9;
unsigned char dac[26];
unsigned int i;
int32_t t_fine;
int32_t adc_P, adc_T, adc_H;
void setup() {
//シリアル通信初期化
Serial.begin(9600);//シリアル通信を9600bpsで初期化
//I2C初期化
Wire.begin();//I2Cを初期化
//BME280動作設定
Wire.beginTransmission(BME280_ADDR);//I2Cスレーブ「Arduino Uno」のデータ送信開始
Wire.write(CONFIG);//動作設定
Wire.write(0x00);//「単発測定」、「フィルタなし」、「SPI 4線式」
Wire.endTransmission();//I2Cスレーブ「Arduino Uno」のデータ送信終了
//BME280測定条件設定
Wire.beginTransmission(BME280_ADDR);//I2Cスレーブ「Arduino Uno」のデータ送信開始
Wire.write(CTRL_MEAS);//測定条件設定
Wire.write(0x24);//「温度・気圧オーバーサンプリングx1」、「スリープモード」
Wire.endTransmission();//I2Cスレーブ「Arduino Uno」のデータ送信終了
//BME280温度測定条件設定
Wire.beginTransmission(BME280_ADDR);//I2Cスレーブ「Arduino Uno」のデータ送信開始
Wire.write(CTRL_HUM);//湿度測定条件設定
Wire.write(0x01);//「湿度オーバーサンプリングx1」
Wire.endTransmission();//I2Cスレーブ「Arduino Uno」のデータ送信終了
//BME280補正データ取得
Wire.beginTransmission(BME280_ADDR);//I2Cスレーブ「Arduino Uno」のデータ送信開始
Wire.write(0x88);//出力データバイトを「補正データ」のアドレスに指定
Wire.endTransmission();//I2Cスレーブ「Arduino Uno」のデータ送信終了
Wire.requestFrom(BME280_ADDR, 26);//I2Cデバイス「BME280」に26Byteのデータ要求
for (i=0; i<26; i++){
while (Wire.available() == 0 ){}
dac[i] = Wire.read();//dacにI2Cデバイス「BME280」のデータ読み込み
}
dig_T1 = ((uint16_t)((dac[1] << 8) | dac[0]));
dig_T2 = ((int16_t)((dac[3] << 8) | dac[2]));
dig_T3 = ((int16_t)((dac[5] << 8) | dac[4]));
dig_P1 = ((uint16_t)((dac[7] << 8) | dac[6]));
dig_P2 = ((int16_t)((dac[9] << 8) | dac[8]));
dig_P3 = ((int16_t)((dac[11] << 8) | dac[10]));
dig_P4 = ((int16_t)((dac[13] << 8) | dac[12]));
dig_P5 = ((int16_t)((dac[15] << 8) | dac[14]));
dig_P6 = ((int16_t)((dac[17] << 8) | dac[16]));
dig_P7 = ((int16_t)((dac[19] << 8) | dac[18]));
dig_P8 = ((int16_t)((dac[21] << 8) | dac[20]));
dig_P9 = ((int16_t)((dac[23] << 8) | dac[22]));
dig_H1 = ((uint8_t)(dac[25]));
Wire.beginTransmission(BME280_ADDR);//I2Cスレーブ「Arduino Uno」のデータ送信開始
Wire.write(0xE1);//出力データバイトを「補正データ」のアドレスに指定
Wire.endTransmission();//I2Cスレーブ「Arduino Uno」のデータ送信終了
Wire.requestFrom(BME280_ADDR, 7);//I2Cデバイス「BME280」に7Byteのデータ要求
for (i=0; i<7; i++){
while (Wire.available() == 0 ){}
dac[i] = Wire.read();//dacにI2Cデバイス「BME280」のデータ読み込み
}
dig_H2 = ((int16_t)((dac[1] << 8) | dac[0]));
dig_H3 = ((uint8_t)(dac[2]));
dig_H4 = ((int16_t)((dac[3] << 4) + (dac[4] & 0x0F)));
dig_H5 = ((int16_t)((dac[5] << 4) + ((dac[4] >> 4) & 0x0F)));
dig_H6 = ((int8_t)dac[6]);
delay(1000);//1000msec待機(1秒待機)
}
void loop() {
int32_t temp_cal;
uint32_t humi_cal, pres_cal;
float temp, humi, pres;
//BME280測定条件設定(1回測定後、スリープモード)
Wire.beginTransmission(BME280_ADDR);//I2Cスレーブ「Arduino Uno」のデータ送信開始
Wire.write(CTRL_MEAS);//測定条件設定
Wire.write(0x25);//「温度・気圧オーバーサンプリングx1」、「1回測定後、スリープモード」
Wire.endTransmission();//I2Cスレーブ「Arduino Uno」のデータ送信終了
delay(10);//10msec待機
//測定データ取得
Wire.beginTransmission(BME280_ADDR);//I2Cスレーブ「Arduino Uno」のデータ送信開始
Wire.write(0xF7);//出力データバイトを「気圧データ」のアドレスに指定
Wire.endTransmission();//I2Cスレーブ「Arduino Uno」のデータ送信終了
Wire.requestFrom(BME280_ADDR, 8);//I2Cデバイス「BME280」に8Byteのデータ要求
for (i=0; i<8; i++){
while (Wire.available() == 0 ){}
dac[i] = Wire.read();//dacにI2Cデバイス「BME280」のデータ読み込み
}
adc_P = ((uint32_t)dac[0] << 12) | ((uint32_t)dac[1] << 4) | ((dac[2] >> 4) & 0x0F);
adc_T = ((uint32_t)dac[3] << 12) | ((uint32_t)dac[4] << 4) | ((dac[5] >> 4) & 0x0F);
adc_H = ((uint32_t)dac[6] << 8) | ((uint32_t)dac[7]);
pres_cal = BME280_compensate_P_int32(adc_P);//気圧データ補正計算
temp_cal = BME280_compensate_T_int32(adc_T);//温度データ補正計算
humi_cal = bme280_compensate_H_int32(adc_H);//湿度データ補正計算
pres = (float)pres_cal / 100.0;//気圧データを実際の値に計算
temp = (float)temp_cal / 100.0;//温度データを実際の値に計算
humi = (float)humi_cal / 1024.0;//湿度データを実際の値に計算
//シリアルモニタ送信
Serial.print("Pressure:");//文字列「Pressure:」をシリアルモニタに送信
Serial.print(pres);//「pres」をシリアルモニタに送信
Serial.print("hPa ");//文字列「hPa 」をシリアルモニタに送信
Serial.print("Temp:");//文字列「Temp:」をシリアルモニタに送信
Serial.print(temp);//「temp」をシリアルモニタに送信
Serial.print("°C ");//文字列「°C 」をシリアルモニタに送信
Serial.print("Humidity:");//文字列「Humidity:」をシリアルモニタに送信
Serial.print(humi);//「humi」をシリアルモニタに送信
Serial.println("%");//文字列「%」をシリアルモニタに送信、改行
delay(1000);//1000msec待機(1秒待機)
}
//温度補正 関数
int32_t BME280_compensate_T_int32(int32_t adc_T)
{
int32_t var1, var2, T;
var1 = ((((adc_T>>3) - ((int32_t)dig_T1<<1))) * ((int32_t)dig_T2)) >> 11;
var2 = (((((adc_T>>4) - ((int32_t)dig_T1)) * ((adc_T>>4) - ((int32_t)dig_T1))) >> 12) * ((int32_t)dig_T3)) >> 14;
t_fine = var1 + var2;
T = (t_fine * 5 + 128) >> 8;
return T;
}
//湿度補正 関数
uint32_t bme280_compensate_H_int32(int32_t adc_H)
{
int32_t v_x1_u32r;
v_x1_u32r = (t_fine - ((int32_t)76800));
v_x1_u32r = (((((adc_H << 14) - (((int32_t)dig_H4) << 20) - (((int32_t)dig_H5) * v_x1_u32r)) + ((int32_t)16384)) >> 15) * (((((((v_x1_u32r * ((int32_t)dig_H6)) >> 10) * (((v_x1_u32r * ((int32_t)dig_H3)) >> 11) + ((int32_t)32768))) >> 10) + ((int32_t)2097152)) *
((int32_t)dig_H2) + 8192) >> 14));
v_x1_u32r = (v_x1_u32r - (((((v_x1_u32r >> 15) * (v_x1_u32r >> 15)) >> 7) * ((int32_t)dig_H1)) >> 4));
v_x1_u32r = (v_x1_u32r < 0 ? 0 : v_x1_u32r);
v_x1_u32r = (v_x1_u32r > 419430400 ? 419430400 : v_x1_u32r);
return (uint32_t)(v_x1_u32r>>12);
}
//気圧補正 関数
uint32_t BME280_compensate_P_int32(int32_t adc_P)
{
int32_t var1, var2;
uint32_t p;
var1 = (((int32_t)t_fine)>>1) - (int32_t)64000;
var2 = (((var1>>2) * (var1>>2)) >> 11 ) * ((int32_t)dig_P6);
var2 = var2 + ((var1*((int32_t)dig_P5))<<1);
var2 = (var2>>2)+(((int32_t)dig_P4)<<16);
var1 = (((dig_P3 * (((var1>>2) * (var1>>2)) >> 13 )) >> 3) + ((((int32_t)dig_P2) * var1)>>1))>>18;
var1 =((((32768+var1))*((int32_t)dig_P1))>>15);
if (var1 == 0)
{
return 0; // avoid exception caused by division by zero
}
p = (((uint32_t)(((int32_t)1048576)-adc_P)-(var2>>12)))*3125;
if (p < 0x80000000)
{
p = (p << 1) / ((uint32_t)var1);
}
else
{
p = (p / (uint32_t)var1) * 2;
}
var1 = (((int32_t)dig_P9) * ((int32_t)(((p>>3) * (p>>3))>>13)))>>12;
var2 = (((int32_t)(p>>2)) * ((int32_t)dig_P8))>>13;
p = (uint32_t)((int32_t)p + ((var1 + var2 + dig_P7) >> 4));
return p;
}Pressure:1023.48hPa Temp:20.63°C Humidity:42.80%
Pressure:1023.43hPa Temp:20.64°C Humidity:42.58%
Pressure:1023.43hPa Temp:20.64°C Humidity:42.38%
Pressure:1023.45hPa Temp:20.64°C Humidity:42.33%
Pressure:1023.51hPa Temp:20.64°C Humidity:42.29%
Pressure:1023.45hPa Temp:20.63°C Humidity:42.26%
Pressure:1023.48hPa Temp:20.63°C Humidity:42.28%
Pressure:1023.45hPa Temp:20.63°C Humidity:42.35%
Pressure:1023.45hPa Temp:20.64°C Humidity:42.39%
Pressure:1023.45hPa Temp:20.65°C Humidity:42.37%
サンプルプログラムでは、セットアップで「I2C初期化」、「BME280動作設定」、「BME280測定条件設定」、「BME280温度測定条件設定」、「BME280補正データ取得」を行います。
メインループで、温湿度・気圧の測定(1回測定後、スリープモード)を行い、補正計算をした後にシリアルモニタに表示させます。
他のデバイスでは、デバイス内で補正計算を行い、補正後の値を出力してくれるタイプもありますが、BME280の場合、補正値の取得と補正計算をプログラムで行わなければならないので、かなり面倒です。
補正計算の関数プログラムは、BME280に記載されており、「BME280_S32_t」などの独自の変数型を「int32_t」や「uint32_t」の変数型に修正して使用しています。
(電源投入直後は気圧が低めに測定されたり、湿度が高めに測定されたりしますが、しばらくすると測定値が安定してきます。)
SPIでの温湿度・気圧測定
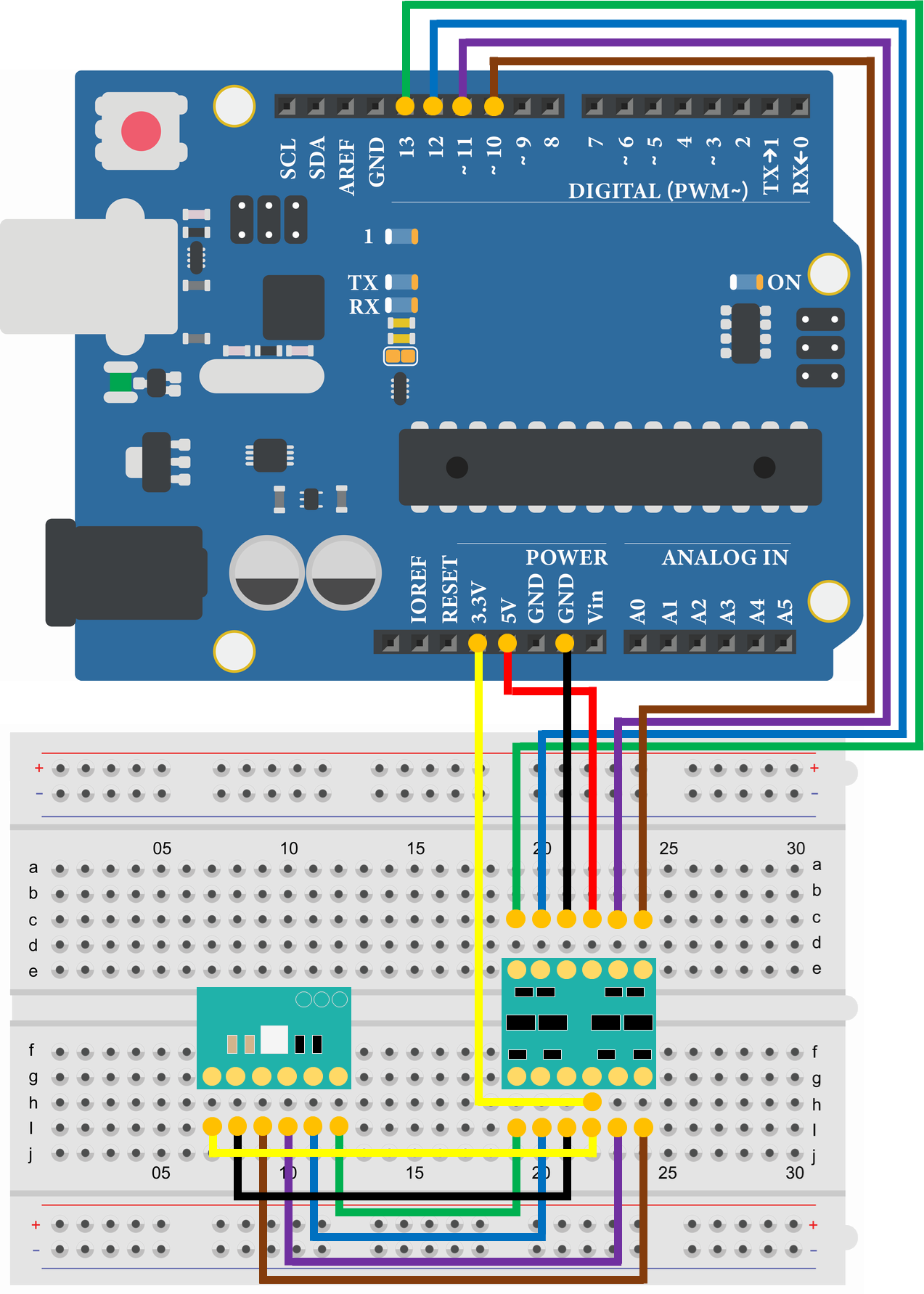
- BME280使用 温湿度・気圧センサモジュールキット
- 4ビット双方向ロジックレベル変換モジュール BSS138使用
- Arduino Uno
- USBケーブル
- ブレッドボード
- ジャンパ線
- PC(プログラム書き込み・シリアルモニタ表示)
#include <SPI.h>
//アドレス指定
#define CONFIG 0xF5
#define CTRL_MEAS 0xF4
#define CTRL_HUM 0xF2
//気温補正データ
uint16_t dig_T1;
int16_t dig_T2;
int16_t dig_T3;
//湿度補正データ
uint8_t dig_H1;
int16_t dig_H2;
uint8_t dig_H3;
int16_t dig_H4;
int16_t dig_H5;
int8_t dig_H6;
//気圧補正データ
uint16_t dig_P1;
int16_t dig_P2;
int16_t dig_P3;
int16_t dig_P4;
int16_t dig_P5;
int16_t dig_P6;
int16_t dig_P7;
int16_t dig_P8;
int16_t dig_P9;
unsigned char dac[26];
unsigned int i;
int32_t t_fine;
int32_t adc_P, adc_T, adc_H;
void setup() {
//シリアル通信初期化
Serial.begin(9600);//シリアル通信を9600bpsで初期化
//SPI初期化
SPI.begin();//SPIを初期化、SCK、MOSI、SSの各ピンの動作は出力、SCK、MOSIはLOW、SSはHIGH
SPI.setDataMode(SPI_MODE0);//SPIモードを「0」に設定・CPOL(クロック位相)=0,CPHA(クロック極性)=0
SPI.setBitOrder(MSBFIRST);//SPI送受信用のビットオーダーを「MSBFIRST」に設定
//BME280動作設定
digitalWrite(SS, LOW);//SSピンの出力をLOW(0V)に設定
SPI.transfer(CONFIG & 0x7F);//動作設定
SPI.transfer(0x00);//「単発測定」、「フィルタなし」、「SPI 4線式」
digitalWrite(SS, HIGH);//SSピンの出力をHIGH(5V)に設定
//BME280測定条件設定
digitalWrite(SS, LOW);//SSピンの出力をLOW(0V)に設定
SPI.transfer(CTRL_MEAS & 0x7F);//測定条件設定
SPI.transfer(0x24);//「温度・気圧オーバーサンプリングx1」、「スリープモード」
digitalWrite(SS, HIGH);//SSピンの出力をHIGH(5V)に設定
//BME280温度測定条件設定
digitalWrite(SS, LOW);//SSピンの出力をLOW(0V)に設定
SPI.transfer(CTRL_HUM & 0x7F);//湿度測定条件設定
SPI.transfer(0x01);//「湿度オーバーサンプリングx1」
digitalWrite(SS, HIGH);//SSピンの出力をHIGH(5V)に設定
//BME280補正データ取得
digitalWrite(SS, LOW);//SSピンの出力をLOW(0V)に設定
SPI.transfer(0x88 | 0x80);//出力データバイトを「補正データ」のアドレスに指定、書き込みフラグを立てる
for (i=0; i<26; i++){
dac[i] = SPI.transfer(0x00);//dacにSPIデバイス「BME280」のデータ読み込み
}
digitalWrite(SS, HIGH);//SSピンの出力をHIGH(5V)に設定
dig_T1 = ((uint16_t)((dac[1] << 8) | dac[0]));
dig_T2 = ((int16_t)((dac[3] << 8) | dac[2]));
dig_T3 = ((int16_t)((dac[5] << 8) | dac[4]));
dig_P1 = ((uint16_t)((dac[7] << 8) | dac[6]));
dig_P2 = ((int16_t)((dac[9] << 8) | dac[8]));
dig_P3 = ((int16_t)((dac[11] << 8) | dac[10]));
dig_P4 = ((int16_t)((dac[13] << 8) | dac[12]));
dig_P5 = ((int16_t)((dac[15] << 8) | dac[14]));
dig_P6 = ((int16_t)((dac[17] << 8) | dac[16]));
dig_P7 = ((int16_t)((dac[19] << 8) | dac[18]));
dig_P8 = ((int16_t)((dac[21] << 8) | dac[20]));
dig_P9 = ((int16_t)((dac[23] << 8) | dac[22]));
dig_H1 = ((uint8_t)(dac[25]));
digitalWrite(SS, LOW);//SSピンの出力をLOW(0V)に設定
SPI.transfer(0xE1 | 0x80);//出力データバイトを「補正データ」のアドレスに指定、書き込みフラグを立てる
for (i=0; i<7; i++){
dac[i] = SPI.transfer(0x00);//dacにSPIデバイス「BM3280」のデータ読み込み
}
digitalWrite(SS, HIGH);//SSピンの出力をHIGH(5V)に設定
dig_H2 = ((int16_t)((dac[1] << 8) | dac[0]));
dig_H3 = ((uint8_t)(dac[2]));
dig_H4 = ((int16_t)((dac[3] << 4) + (dac[4] & 0x0F)));
dig_H5 = ((int16_t)((dac[5] << 4) + ((dac[4] >> 4) & 0x0F)));
dig_H6 = ((int8_t)dac[6]);
delay(1000);//1000msec待機(1秒待機)
}
void loop() {
int32_t temp_cal;
uint32_t humi_cal, pres_cal;
float temp, humi, pres;
//BME280測定条件設定(1回測定後、スリープモード)
digitalWrite(SS, LOW);//SSピンの出力をLOW(0V)に設定
SPI.transfer(CTRL_MEAS & 0x7F);//測定条件設定
SPI.transfer(0x25);//「温度・気圧オーバーサンプリングx1」、「1回測定後、スリープモード」
digitalWrite(SS, HIGH);//SSピンの出力をHIGH(5V)に設定
delay(10);//10msec待機
//測定データ取得
digitalWrite(SS, LOW);//SSピンの出力をLOW(0V)に設定
SPI.transfer(0xF7 | 0x80);//出力データバイトを「気圧データ」のアドレスに指定、書き込みフラグを立てる
for (i=0; i<8; i++){
dac[i] = SPI.transfer(0x00);//dacにSPIデバイス「BME280」のデータ読み込み
}
digitalWrite(SS, HIGH);//SSピンの出力をHIGH(5V)に設定
adc_P = ((uint32_t)dac[0] << 12) | ((uint32_t)dac[1] << 4) | ((dac[2] >> 4) & 0x0F);
adc_T = ((uint32_t)dac[3] << 12) | ((uint32_t)dac[4] << 4) | ((dac[5] >> 4) & 0x0F);
adc_H = ((uint32_t)dac[6] << 8) | ((uint32_t)dac[7]);
pres_cal = BME280_compensate_P_int32(adc_P);//気圧データ補正計算
temp_cal = BME280_compensate_T_int32(adc_T);//温度データ補正計算
humi_cal = bme280_compensate_H_int32(adc_H);//湿度データ補正計算
pres = (float)pres_cal / 100.0;//気圧データを実際の値に計算
temp = (float)temp_cal / 100.0;//温度データを実際の値に計算
humi = (float)humi_cal / 1024.0;//湿度データを実際の値に計算
//シリアルモニタ送信
Serial.print("Pressure:");//文字列「Pressure:」をシリアルモニタに送信
Serial.print(pres);//「pres」をシリアルモニタに送信
Serial.print("hPa ");//文字列「hPa 」をシリアルモニタに送信
Serial.print("Temp:");//文字列「Temp:」をシリアルモニタに送信
Serial.print(temp);//「temp」をシリアルモニタに送信
Serial.print("°C ");//文字列「°C 」をシリアルモニタに送信
Serial.print("Humidity:");//文字列「Humidity:」をシリアルモニタに送信
Serial.print(humi);//「humi」をシリアルモニタに送信
Serial.println("%");//文字列「%」をシリアルモニタに送信、改行
delay(1000);//1000msec待機(1秒待機)
}
//温度補正 関数
int32_t BME280_compensate_T_int32(int32_t adc_T)
{
int32_t var1, var2, T;
var1 = ((((adc_T>>3) - ((int32_t)dig_T1<<1))) * ((int32_t)dig_T2)) >> 11;
var2 = (((((adc_T>>4) - ((int32_t)dig_T1)) * ((adc_T>>4) - ((int32_t)dig_T1))) >> 12) * ((int32_t)dig_T3)) >> 14;
t_fine = var1 + var2;
T = (t_fine * 5 + 128) >> 8;
return T;
}
//湿度補正 関数
uint32_t bme280_compensate_H_int32(int32_t adc_H)
{
int32_t v_x1_u32r;
v_x1_u32r = (t_fine - ((int32_t)76800));
v_x1_u32r = (((((adc_H << 14) - (((int32_t)dig_H4) << 20) - (((int32_t)dig_H5) * v_x1_u32r)) + ((int32_t)16384)) >> 15) * (((((((v_x1_u32r * ((int32_t)dig_H6)) >> 10) * (((v_x1_u32r * ((int32_t)dig_H3)) >> 11) + ((int32_t)32768))) >> 10) + ((int32_t)2097152)) *
((int32_t)dig_H2) + 8192) >> 14));
v_x1_u32r = (v_x1_u32r - (((((v_x1_u32r >> 15) * (v_x1_u32r >> 15)) >> 7) * ((int32_t)dig_H1)) >> 4));
v_x1_u32r = (v_x1_u32r < 0 ? 0 : v_x1_u32r);
v_x1_u32r = (v_x1_u32r > 419430400 ? 419430400 : v_x1_u32r);
return (uint32_t)(v_x1_u32r>>12);
}
//気圧補正 関数
uint32_t BME280_compensate_P_int32(int32_t adc_P)
{
int32_t var1, var2;
uint32_t p;
var1 = (((int32_t)t_fine)>>1) - (int32_t)64000;
var2 = (((var1>>2) * (var1>>2)) >> 11 ) * ((int32_t)dig_P6);
var2 = var2 + ((var1*((int32_t)dig_P5))<<1);
var2 = (var2>>2)+(((int32_t)dig_P4)<<16);
var1 = (((dig_P3 * (((var1>>2) * (var1>>2)) >> 13 )) >> 3) + ((((int32_t)dig_P2) * var1)>>1))>>18;
var1 =((((32768+var1))*((int32_t)dig_P1))>>15);
if (var1 == 0)
{
return 0; // avoid exception caused by division by zero
}
p = (((uint32_t)(((int32_t)1048576)-adc_P)-(var2>>12)))*3125;
if (p < 0x80000000)
{
p = (p << 1) / ((uint32_t)var1);
}
else
{
p = (p / (uint32_t)var1) * 2;
}
var1 = (((int32_t)dig_P9) * ((int32_t)(((p>>3) * (p>>3))>>13)))>>12;
var2 = (((int32_t)(p>>2)) * ((int32_t)dig_P8))>>13;
p = (uint32_t)((int32_t)p + ((var1 + var2 + dig_P7) >> 4));
return p;
}Pressure:1023.48hPa Temp:20.63°C Humidity:42.80%
Pressure:1023.43hPa Temp:20.64°C Humidity:42.58%
Pressure:1023.43hPa Temp:20.64°C Humidity:42.38%
Pressure:1023.45hPa Temp:20.64°C Humidity:42.33%
Pressure:1023.51hPa Temp:20.64°C Humidity:42.29%
Pressure:1023.45hPa Temp:20.63°C Humidity:42.26%
Pressure:1023.48hPa Temp:20.63°C Humidity:42.28%
Pressure:1023.45hPa Temp:20.63°C Humidity:42.35%
Pressure:1023.45hPa Temp:20.64°C Humidity:42.39%
Pressure:1023.45hPa Temp:20.65°C Humidity:42.37%
サンプルプログラムでは、I2Cのサンプルプログラムとほぼ同様に、セットアップで「SPI初期化」、「BME280動作設定」、「BME280測定条件設定」、「BME280温度測定条件設定」、「BME280補正データ取得」を行います。
メインループで、温湿度・気圧の測定(1回測定後、スリープモード)を行い、補正計算をした後にシリアルモニタに表示させます。
他のデバイスでは、デバイス内で補正計算を行い、補正後の値を出力してくれるタイプもありますが、BME280の場合、補正値の取得と補正計算をプログラムで行わなければならないので、かなり面倒です。
補正計算の関数プログラムは、BME280に記載されており、「BME280_S32_t」などの独自の変数型を「int32_t」や「uint32_t」の変数型に修正して使用しています。
(電源投入直後は気圧が低めに測定されたり、湿度が高めに測定されたりしますが、しばらくすると測定値が安定してきます。)
なお、SPIで使われる各端子の説明は以下にまとめました。サンプルプログラムのSPIライブラリでも端子名が使われています。
- SCK(Serial ClocK) :通信タイミング用のクロック
- MISO(Master In Slave Out) :スレーブからマスターへのデータ送信
- MOSI(Master Out Slave In) :マスターからスレーブへのデータ送信
- SS(Slave Select pin) :制御対象にするデバイス選択
おすすめのArduinoボードはどれ?
当記事『Arduino-温湿度・気圧センサ「BME280」の使い方』では、Arduino Unoを使用したサンプルプログラムを解説してきました。
やはり、たくさんの種類のあるArduinoボードの中でも、最も基本的なエディションのArduino Unoがおすすめなのですが、Arduino Unoと電子部品を組み合わせたキットも存在します。
電子工作初心者にとっては、いちいち電子部品を別途購入する必要がないので非常に有用です。以下の記事で初心者でもわかりやすいように、ランキング形式でおすすめのArduino Unoを紹介しているので、ぜひご覧ください。
また、以下の記事で、安価でWi-Fi/Bluetoothに対応している「ESP32開発ボード」についてもまとめてみました。
このボードは、Arduinoボードではありませんが、Arduino IDEでソフト開発ができるため、電子工作でIoTを実現したい方におすすめです。
